舵机控制
控制引脚驱动舵机
数值范围:0 ~ 180, 255 (255为释放舵机)
id前缀:s:
示例
下面展示如何控制一个舵机运动
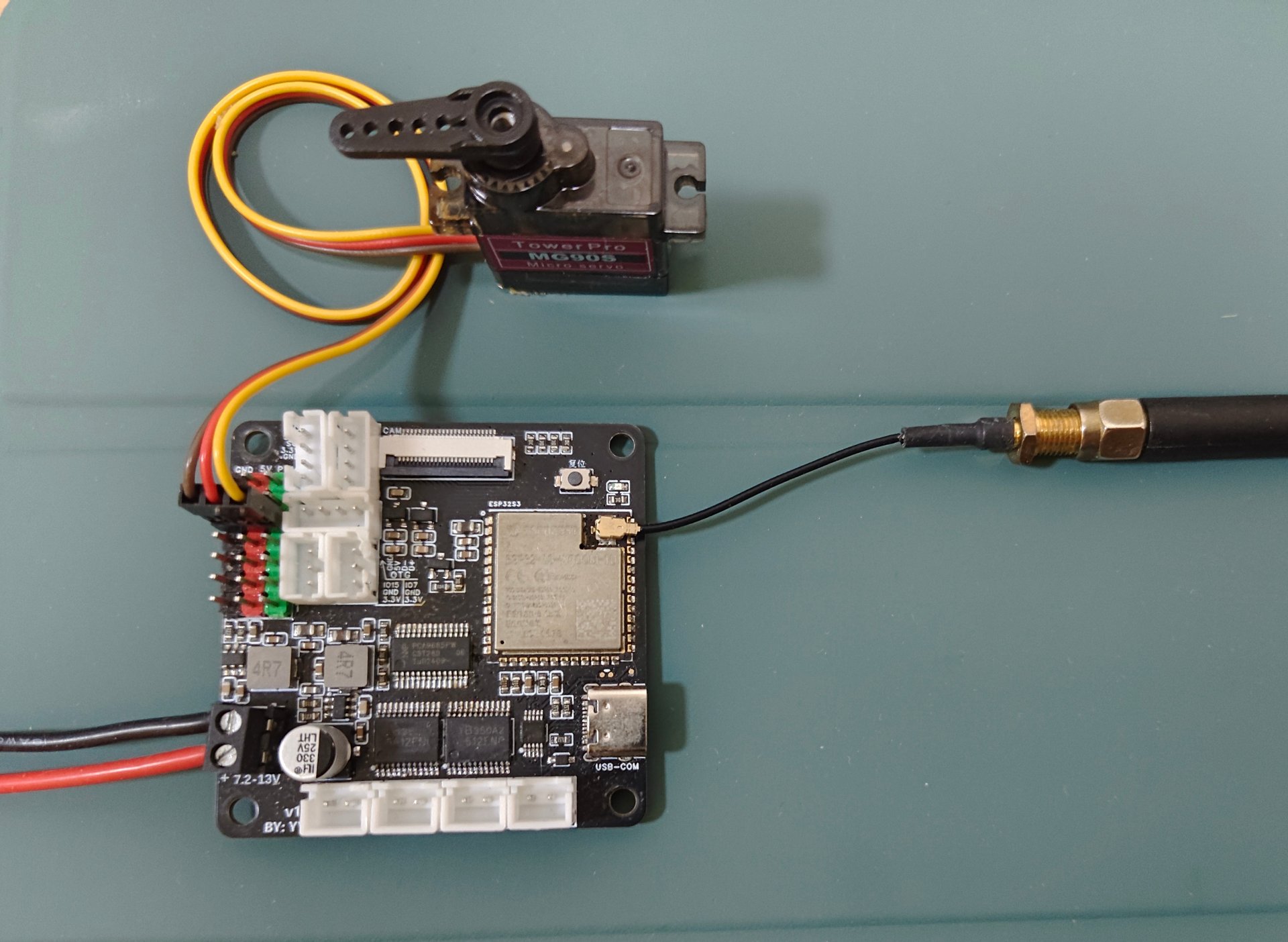
硬件连接
提示
在新增舵机的引脚选择中能够查看到支持控制舵机的引脚
这里将舵机的控制引脚连接到IO18引脚
配置示例
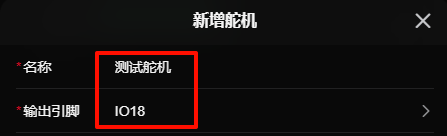
在设置中新增一个舵机,为他起个名称,并选择输出引脚为IO18
示例控制
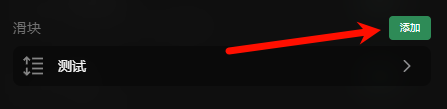
这里使用滑块插件来示例控制他
- 添加或使用已有的滑块插件

- 进入
插件设置,选择添加一个滑块
选择设备栏选择我们刚刚新增的舵机

- 返回控制页面,找到添加的滑块插件就可以愉快的玩耍啦 ヾ(≧▽≦*)o
配置
- 名称*: 名称
- 输出引脚*: 需要选择一个支持舵机输出的引脚或选择选择一个pwm设备
- 默认角度: 小车上电时的默认角度(留空时会默认释放)
- 最小角度: 会限制角度不小于这个值
- 最大角度: 会限制角度不大于这个值
- 重连时回到默认角度: 重新连接或断开连接时会回到默认角度
- 频率: 频率,使用扩展版扩展的io不可设置
- 脉宽最小值: 驱动舵机的脉宽最小值(默认544)
- 脉宽最大值: 驱动舵机的脉宽最大值(默认2400)